 English
English Spanish
Spanish Chinese
Chinese Canada
Canada Mexico
Mexico United Kingdom
United Kingdom




We have all heard of servos (short for servomechanism) but exactly what characterizes a “servo” is often a cloudy topic.
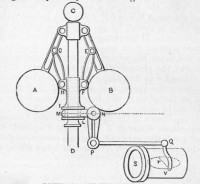
Most sources are in agreement that the centrifugal ball governor invented by James Watt and used to control the speed of steam engines was the first application of a powered servo mechanism. This eloquently simple device utilized centrifugal force to raise or lower a set of balls that were attached to a shaft driven by the engine being controlled. As the speed of the engine increased, the balls would move higher and higher as centrifugal force increased. The height if the balls controlled a valve which delivered more or less steam to the engine as required to maintain the desired ball height, hence the speed of the engine.
In the cleaning industry, servos are often used to control temperature and motion. So exactly what is a “servo?” The characteristic of a servo which differentiates it from other control schemes is that it is interactive. Consider the following illustrations. In both cases, the task is to move an item (in this case a box, for example) from position “A” to position “B.” This is to be accomplished with a conveyor belt with a means to detect position. In a conventional control system, limit switches are used to detect when the conveyor belt is in position “A” or position “B.” The limit switches control a fixed speed motor by turning the motor on or off. A flange attached to the conveyor belt activates the limit switches.
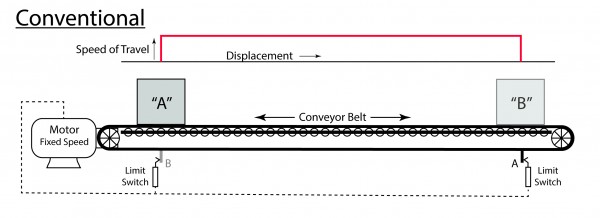
Although the speed of the motor may be variable, the speed of the belt does does not change during the transfer from position “A” to position “B” except for starting and stopping. Considerations in a conventional control system are
- Acceleration must be limited to a speed that will not damage or cause slipping of the load on the conveyor belt.
- The speed must be limited to prevent “overshoot” when the desired position is achieved.
- Conditions are totally unknown between the start point and the end point.
Now the servo system.
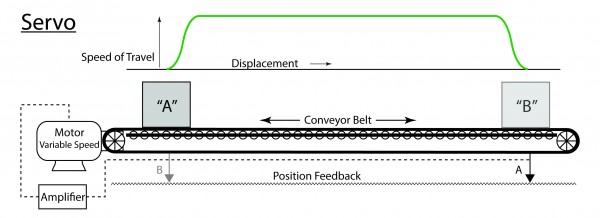
A servo system includes a position feedback device which reports the position of the conveyor constantly. This feedback device can be in the form or a potentiometer, an optical counter or any of a number of suitable devices. The information from this indicator is received by a control interface (often called an “amplifier” by convention) which compares it to the desired value at any given time. The control interface interprets the feedback and applies an appropriate corrective signal to drive the controlled device to the target. The control interface can be customized to react in specialized ways. For example, if the feedback indicates that the target is some distance away, it might increase the speed of travel and then ramp down as the target is approached. As a result, the time required to move from “A” to “B” in our example above can be greatly reduced as shown in the graphs above each illustration.
Servo systems can also be used to help control temperature as described in the blog on temperature controls.
Servo controls, although usually more costly than more conventional controls have the benefit of being able to provide precise control in a programmable way.
– FJF –