 English
English Spanish
Spanish Chinese
Chinese Canada
Canada Mexico
Mexico United Kingdom
United Kingdom




How Much Heat? –
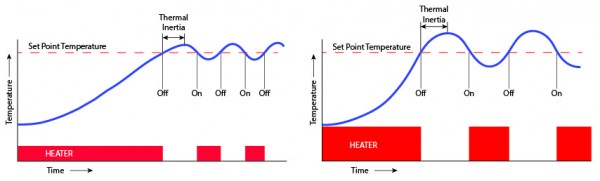
It is common for the design engineer to calculate the heat requirement for the tanks of a cleaning system based on the tank volume, the target operating temperature and the desired heat-up time from ambient temperature to operating temperature taking into account, of course, heat losses through the tank walls and from the surface of the liquid. In most cases, this calculation is sufficient, but there are cases in which other factors must be taken into consideration. The problem with heaters (especially electric heaters) is that they still continue to heat after being turned off. In general, the larger the amount of heat, the more heat the heaters store in their mass as thermal inertia. Even though the heat is turned off when the desired temperature is reached, the residual heat in the heaters may cause a “spike” in temperature that may be detrimental to the process. Excess heater capacity can lead to temperature over-shooting and wide temperature variations due to higher thermal inertia.
In another example, consider a case where cold parts introduced into the cleaning tank have significant mass or are being introduced in large numbers. In such a case, since the parts are consuming heat as well, the heat required to maintain the desired temperature in the tank may be more than just that required to heat the tank up to the desired temperature in a given time. Another consideration is in ultrasonic systems where ultrasonic energy provides heat to the tank. As the majority of ultrasonic energy delivered to a cleaning tank ultimately turns into heat, a 2,000 watt ultrasonic transducer is very similar to a 2,000 watt heater in its effect on tank heating! Depending on the heat load introduced into the tank by the parts, heat provided by the ultrasonic system may be adequate to maintain tank temperature without any additional heat at all. In fact, there are rare cases where cooling must be employed to keep the tank temperature within the desired limits during ultrasonic operation.
Temperature Control –
Control of temperature in a cleaning tank may, at first, seem very simple – – a temperature sensor is used to turn the heat on when the temperature is below a set limit and off when the desired temperature is reached. In many cases, a control of this type is adequate. There are others, however, where due to thermal inertia, more sophisticated control schemes are required. The two most common are the use of dual heaters and temperature controllers that anticipate the temperature target. In the case of dual heaters, a higher capacity heater is used in combination with a lower capacity heater. The two are used together until a temperature near the target temperature is reached. At that point, the higher capacity heater turns off allowing its thermal inertia along with the lower capacity heater to achieve the temperature target. In the case of anticipating temperature controls, a “smart” controller throttles the heat by cycling power on and off (time proportioning) or reducing voltage as the temperature starts to approach the target temperature.
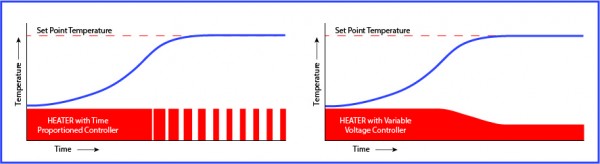
Controllers of this type normally have adjustments to set the temperature differential at which the throttling process begins. Some even track the rate of temperature increase to determine when to start the throttling process to achieve the desired temperature without over-shoot.
– FJF –