 English
English Spanish
Spanish Chinese
Chinese Canada
Canada Mexico
Mexico United Kingdom
United Kingdom




Earlier blogs have shown how difficult and deceptive it can be to relate energy consumed to work delivered. In this blog I would like to offer an example of this difficulty as it relates directly to ultrasonic transducers and cleaning. First of all, most (if not all) ultrasonic devices used for cleaning utilize a number of individual vibrators attached to a plate or diaphragm which, in turn, is vibrated by the individual vibrators to produce sound waves in a liquid media contacting the plate on the side opposite the individual vibrators. Sometimes we call the entire assembly consisting of the vibrators and the plate the transducer, but in other cases we refer to the individual vibrators as transducers as well. We have also discussed in earlier blogs that these vibrators (or transducers) depend on resonance at a particular frequency or frequencies (in the case of multiple frequency transducers) to deliver the desired high amplitude of vibration required to produce cavitation and implosion in the liquid. Each of the individual vibrators is capable of converting approximately 40 watts of electrical energy into mechanical energy as vibration. The actual power depends on the design of the vibrator which varies from manufacturer to manufacturer. The power of each vibrator is confined to some degree by the fact that only so much energy can be transmitted per given area of the output face of the transducer into the liquid in contact with it. Increasing the power to the vibrators is deleterious to their function and efficiency of energy transmission.
Note – An analogy to the above can be found in the incandescent light bulb. Increasing the output of the bulb entails increasing its size accordingly to accommodate a larger filament and provide the necessary cooling, etc. to provide a practical life. The ultrasonic vibrator, however, because of the need for resonance is limited in size and, therefore, capacity.
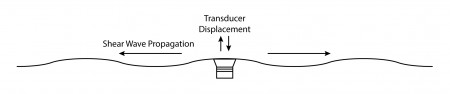
Our discussions regarding ultrasonic transducers to this point have focused on the vibration produced along the axis of the transducer (push and pull if you will). There are, however, many other modes of vibration as well. For example, the following illustration shows that as the vibrator attached to a plate vibrates up and down, a resulting wave moves through the plate lateral to the axial vibration. This is called a shear wave.
The next illustration shows an ideal situation where vibrators are spaced in such a way that each adds to the lateral motion of the shear wave initiated by the adjacent vibrator.

At times, there is an irresistible temptation to increase ultrasonic power in the interest of, supposedly, providing more ultrasonic energy. This can be driven by actual need but, in many cases, is just for the sake of an assumed more powerful and, hence, effective ultrasonic transducer. Since the transducer plate size is often limited, and since each vibrator is capable of only providing a limited amount of power, the inevitable result is that more vibrators are added. This, of course, requires the vibrators to be placed closer and closer together which, in turn, may lead to a situation where some of the vibrators act as the wheel rotating in the opposite direction discussed in an earlier blog.
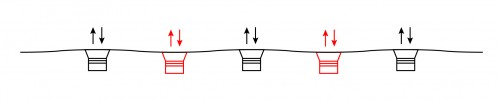
In the above case, the red and black vibrators are working in opposition to each other. Each, however, is consuming its allotted electrical energy. So, although the power consumed has been increased, the resulting ultrasonic effect has not benefited linearly with the added power and, in some cases, may be reduced.
The above is an example of just one of many considerations in designing an effective ultrasonic cleaning system – – and just one example of a case where more may not be better.
– FJF –